搜索
400-996-7588

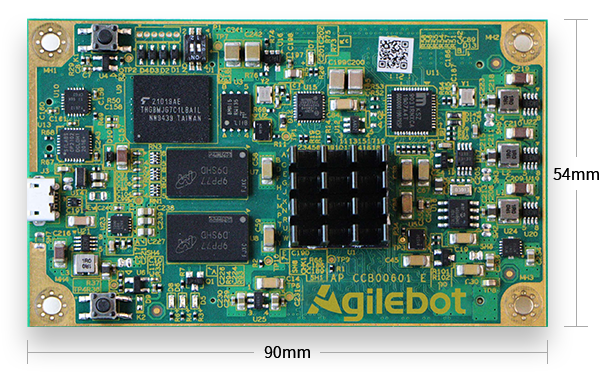
依托完全自主知识产权的世界首款单芯片多轴驱控一体运动控制器 SCIMC,和先进的运动控制技术,捷勃特研发了专门面对工业机器人行业的精密运动控制平台。











 微信公众号
微信公众号
 视频号
视频号
 抖音
抖音
上海捷勃特机器人有限公司  沪ICP备2020034948号-2
沪ICP备2020034948号-2














































